目次
Outdoor moblile car type robot
Path planning of autonomous car
We are studying a new route planning method in automatic driving.
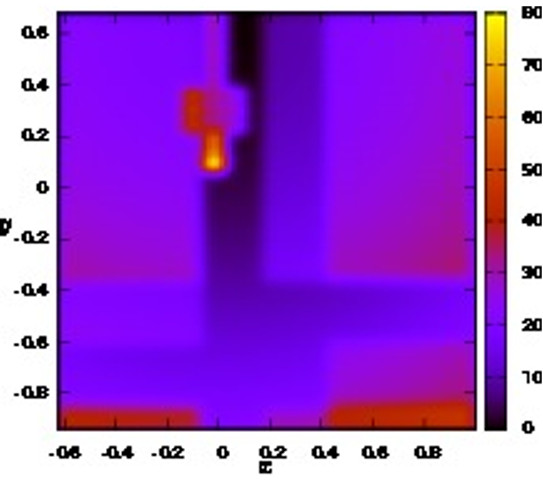
In this laboratory we proposed a path planning method using the population potential method. We will make a route plan by combining the potential field based on the real time measurement information which has been done conventionally, the potential field based on the traffic rule and the potential field based on the experience of the driver.
In this laboratory we proposed a path planning method using the population potential method. We will make a route plan by combining the potential field based on the real time measurement information which has been done conventionally, the potential field based on the traffic rule and the potential field based on the experience of the driver.
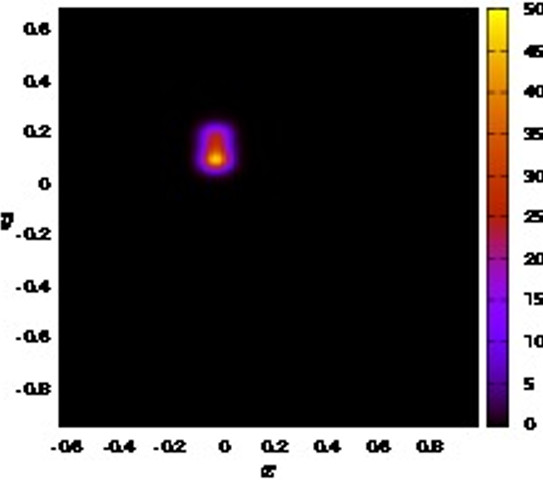
Expression of point cloud of obstacle measured by in-vehicle sensor in potential field
Synthesis of potential field based on experience
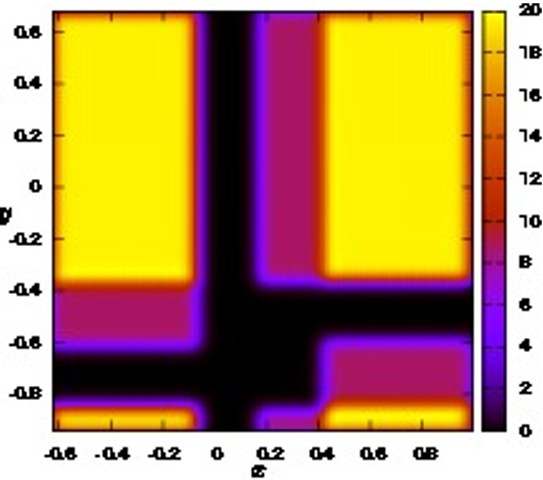
Synthesis of potential field based on experience