目次
Neural Network
Grasp planning for unknown objects
The aim of this research is developping an algorithm to detect propper grasping position of the unknown object for the industrial robot.
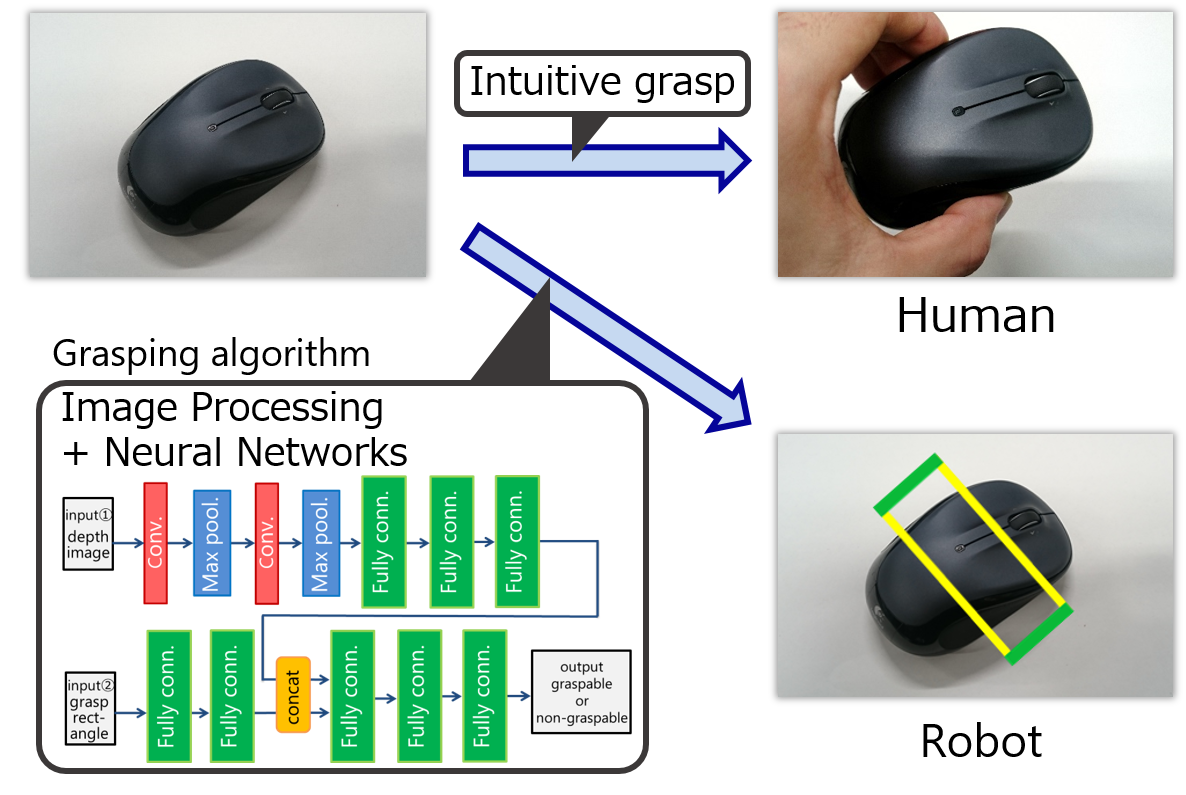
We can intuitively grasp an object without considering how to grasp it even if the object is never seen before. On the other hand, it is hard for the robot to do the same work as us. In the most of present factories, the industrial robot is handling the object which is measured its dimentions in advance. The lack of the manpower is concerned at many factory works such as sorting electronics garbage or foodstuffs. It is hard to introduce industrial robots to such place because there will be a lot of unknown shape objects needed to be grasp. This is serious problem especially in Japan. We are developing a combined grasping algorithm of image processing and neural networks to solve this problem.
We can intuitively grasp an object without considering how to grasp it even if the object is never seen before. On the other hand, it is hard for the robot to do the same work as us. In the most of present factories, the industrial robot is handling the object which is measured its dimentions in advance. The lack of the manpower is concerned at many factory works such as sorting electronics garbage or foodstuffs. It is hard to introduce industrial robots to such place because there will be a lot of unknown shape objects needed to be grasp. This is serious problem especially in Japan. We are developing a combined grasping algorithm of image processing and neural networks to solve this problem.
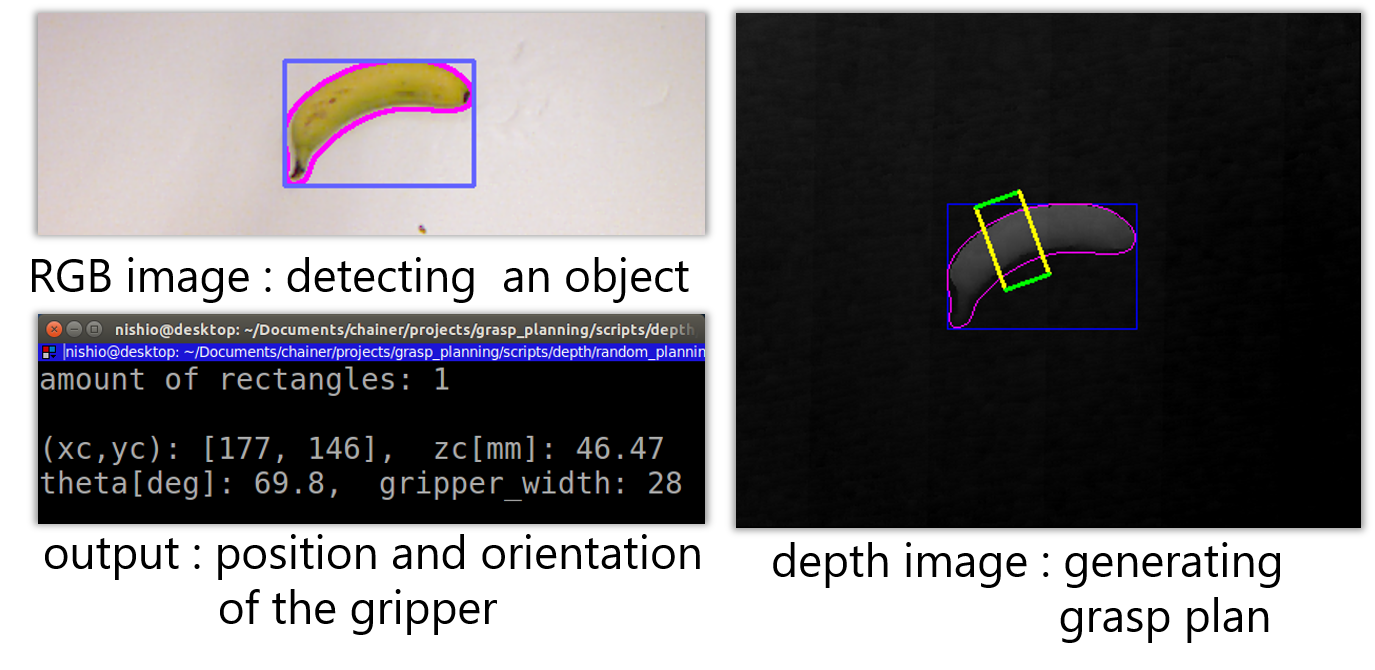
The outline of the grasp planning algrithm
The use of parralel gripper is assumed in current grasping algorithm. The input of the algorithm is the couple of RGB image and depth image of an object taken from the Kinect v2 sensor. The algoritm is separated into 2 parts. The first part is object detection phase and the second part is grasp planning phase. At the object detection phase, simple image prosessing is used to recognize the object from background. At the grasp planning phase, the object region which is detected from the RGB image is applied to the depth image. And then, the grasp plan is generated from the algorithm which contains Convolutional Neural Networks. The grasp plan contains 3D position and orientation of the gripper. We are trying to realize stable and precise grasping algorithm to detect grasp plan even for the multiple objects on the conveyor belt in the near future.