目次
ニューラルネットワーク
Path planning by neural network learning using RRT
現在まで,ロボットのパスプランニングに関する数多くの手法が提案されています.
その一つであるRRT(Rapidly-exploring Random Tree)は,ランダムにばらまいたノードを繋げて経路を生成します.
しかし乱数を用いるため,同一の始点と終点の組に対して生成される軌道が毎回変動してしまう問題があります.
一方,ニューラルネットワーク(NN: Neural Network)を利用して軌道生成を行う手法では,学習後に高速に軌道を生成でき,また,同一の始点と終点の組に対して同一の軌道を生成することができます. しかしこれらの手法では,学習のために教師つきデータを大量に用意する必要があります. これらの問題を解決するために,メタヒューリスティクス手法(RRT)と NN を融合して用いるパスプランニング手法を提案しています. 具体的には,多層ニューラルネットワーク(MLN: Multi Layerd Neural Network)を用いて,軌道の中間点を階層的に想起することにより,準最適な軌道生成を行います.
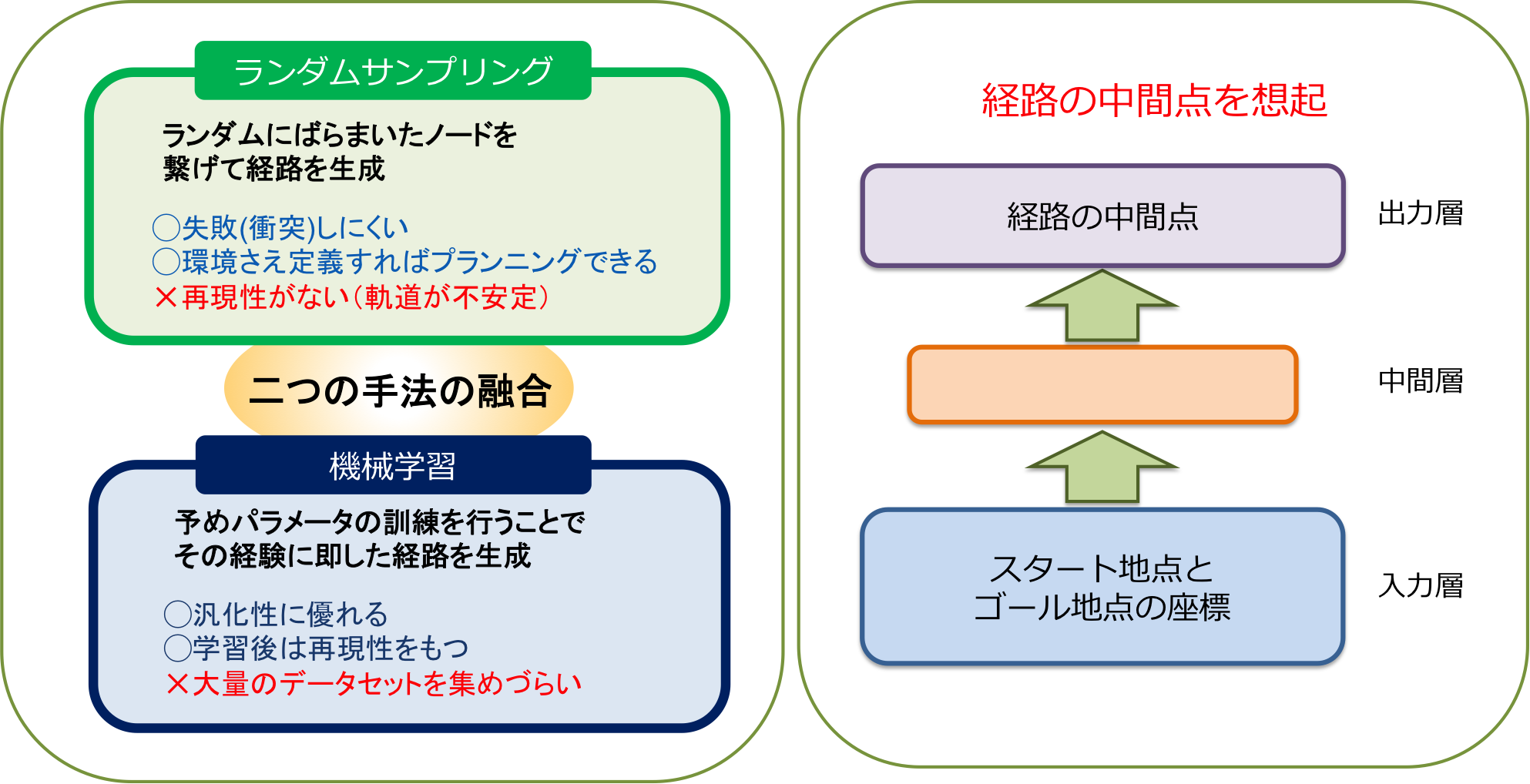
一方,ニューラルネットワーク(NN: Neural Network)を利用して軌道生成を行う手法では,学習後に高速に軌道を生成でき,また,同一の始点と終点の組に対して同一の軌道を生成することができます. しかしこれらの手法では,学習のために教師つきデータを大量に用意する必要があります. これらの問題を解決するために,メタヒューリスティクス手法(RRT)と NN を融合して用いるパスプランニング手法を提案しています. 具体的には,多層ニューラルネットワーク(MLN: Multi Layerd Neural Network)を用いて,軌道の中間点を階層的に想起することにより,準最適な軌道生成を行います.
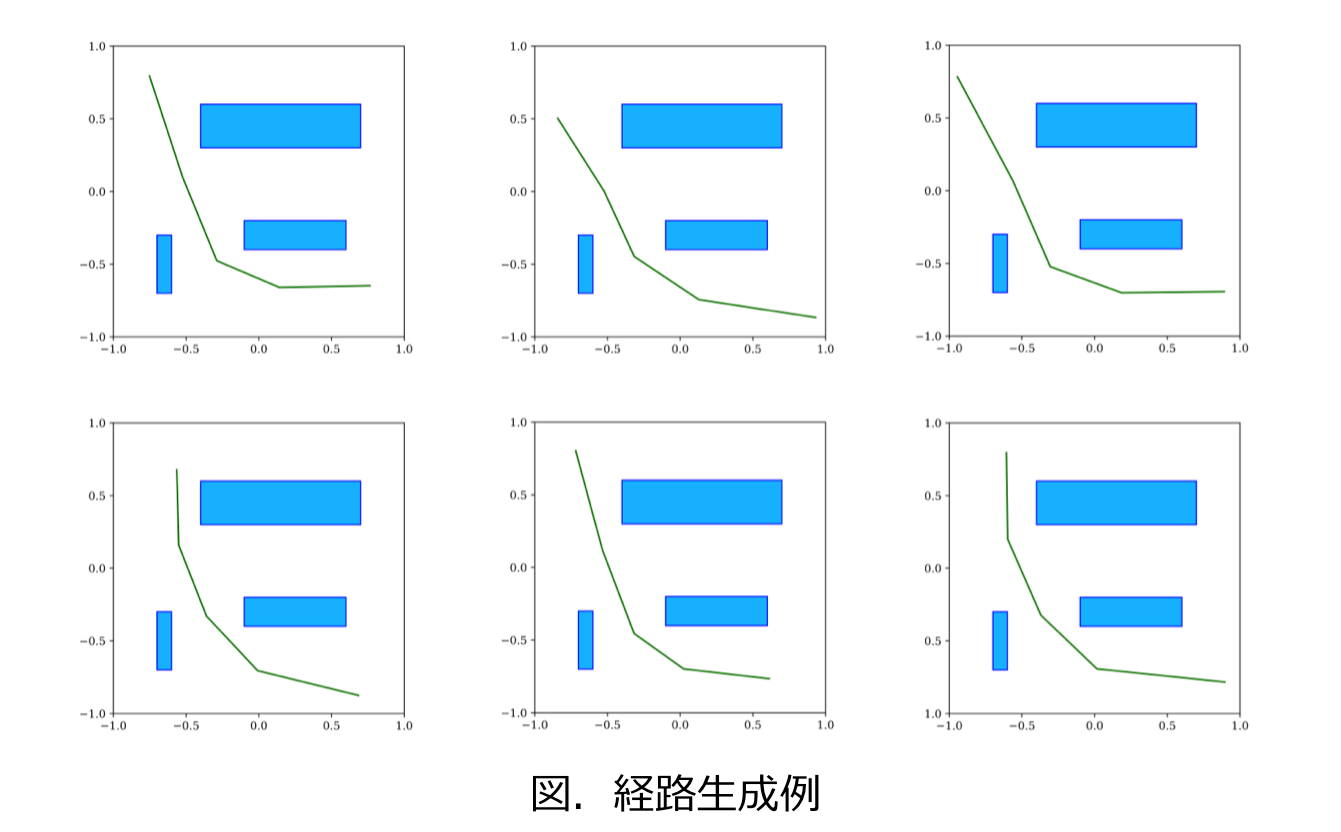
RRTとMLNを用いた経路生成
現在は,二次元環境を対象にシミュレーションを行っています.初めに,任意のスタート・ゴールゾーン中の始点と終点の組に対してRRTを用いて大量に経路を生成します(データセットの作成). その後,MLNを用いて学習を行い,学習後に階層的に中間点を想起することで経路生成を行います.
この手法によって生成される経路は準最適な経路であり,他の最適化手法と組み合わせて用いることによってより最適な経路生成が可能になると考えています. また,学習時間にかかる時間が非常に短く(約2.5秒),環境変化に対する学習のやり直しに対応することが容易です.