目次
Sensor fusion
Object identification from the point cloud measured in the living environment
In recent years, household robots equipped with RGB-D sensors are active.
By using the RGB - D sensor, information on the environment and geography around the robot can be processed by computer as a point cloud.
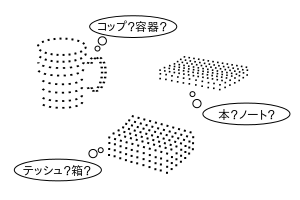
I remove the point group which is considered as background from this point group, I am studying to find each individual object and identify that object.
In the research, we use Kinect for Windows ver. 2 to measure data including the background.
We are doing research to recognize the point group from the measured point clouds and the point cloud obtained from each object point group with the background removed.
Recently, we proposed a method to identify the shape of the point cloud obtained by measuring the object at high speed.
Recently, we proposed a method to identify the shape of the point cloud obtained by measuring the object at high speed.