Index
Next Gen. smart industrial robot
Parallel Gripper Using Reformed Magnetorheological Fluid
MRα fluid gripper can grip the various shaped object, however, it needs to exert some pressure against an object for gripping.
That is, it’s difficult to grip a fragile object.
In this study, we downsize MRα fluid gripper and combined it with parallel gripper.
MRα fluid gripper uses an electromagnet for magnetic field source. However, we found that an electromagnet isn’t suitable for downsizing it, and developed “the permanent magnet moving mechanism”.
The surface of its elastic membrane is designed with a matte finish and this matte finish reduces sticking between an object and the elastic membrane, and improves the release performance.
Demonstration using the gripper at International Robot Exhibition 2015
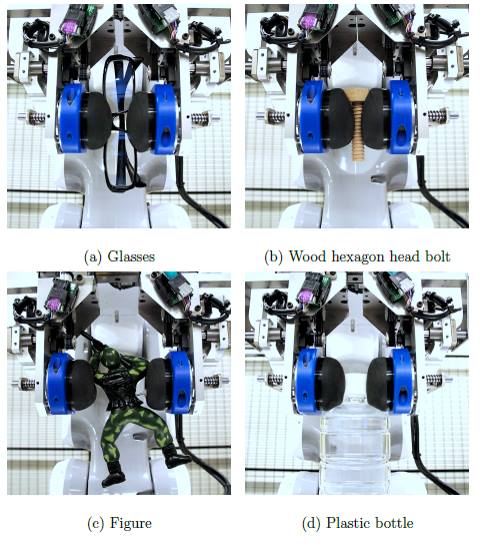
Gripping the various shaped object
Parallel gripper can grip objects with complex shaped which MRα fluid gripper cannot grip.
For example, the gripper can grip an orange and a bottle (Soft object), and glasses and a figure (object with complex shaped).
津上 祐典, 西田 健, ''改質MR流体を用いるパラレルグリッパの開発,'' 第34回日本ロボット学会学術講演会, 山形大学,Sep. 2016.

Y. Tsugami, T. Barbié, K. Tadakuma, T. Nishida''Development of Universal Parallel Gripper Using Reformed Magnetorheological Fluid,'' Proc. of The 2017 Asian Control Conference, Gold Coast, Australia, Dec. 17-20, 2017.