目次
Next Gen. smart industrial robot
Construction of the Robotic Intelligent sensors
In this research, we are working on the construction of RIS (Robotic Intelligent Space) which is a work space for industrial robot using three-dimensional measurement sensor.
Space recognition with sensors is very important in introducing robots to the factory.
This is because it is the first part to be needed in responding to unexpected situations and collaborating between robots.
For example, when thinking about the factory production line where things flow, the robot needs to recognize what has entered the work space and execute the work against it. In this dynamically changing environment as well, it is possible to construct an intelligent type system that robots think and execute on their own. Through this study, we aim for 3D real-time spatial recognition.
For example, when thinking about the factory production line where things flow, the robot needs to recognize what has entered the work space and execute the work against it. In this dynamically changing environment as well, it is possible to construct an intelligent type system that robots think and execute on their own. Through this study, we aim for 3D real-time spatial recognition.

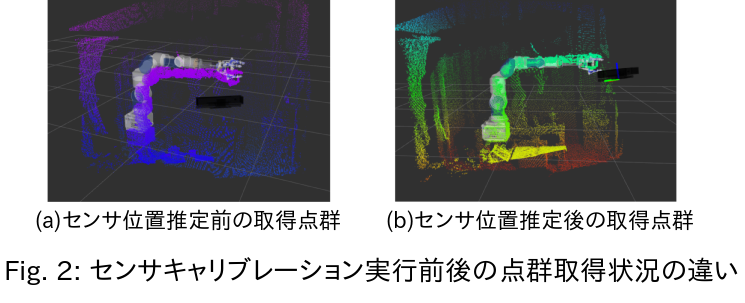
Autmatic calibration for RGB-D sensors
For building RIS, it is essential that the camera is properly calibrated. So we are doing research on automation of external calibration of RGB-D camera. In the conventional method, the relative position was calculated from the photographed image using the calibration board, but in this research, by utilizing the fact that the position and shape of the industrial robot used are known, by using a sensor, we calculate the relative position by matching with the model using the obtained point cloud information and estimate the position and orientation of the camera. ICP algorithm is used for matching 3D point cloud data, and information is acquired and updated in real time using ROS (Robot Operating System).