目次
Next Gen. smart industrial robot
Motion planning for the industrial robot arm
The industrial robot is widely used in various purposes.
To program a motion of the robot, teaching playback method is generally applied.
In the teaching playback method, engineers must program the motion in advance and the robot just follows it.
Since this conventional method has no multiplicity of use, it is needed to reprogram the different motion when the environment around the robot is changed.
To solve this problem, we are developing new teaching method. In the proposed method, an entire workspace of the robot is measured.
By knowing the position of the obstacles, the robot system can generate an optimised safe motion.
Motion planning method
We are working on the motion planning problem by using RRT (Rapidly-exploring Random Tree). In our method, user just gives initial and goal position to the robot. Then the system automatically estimates the trajectory by RRT to complement the motion. To generate more stable trajectory, we focus on the safty of the generated trajectory and propose a method which introduces the idea from potential method by defining the cost function on the distance to the obstacle. You can see the video of RRT trajectory search by clicking the figure.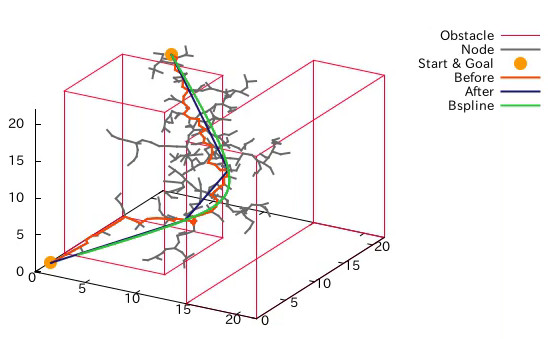
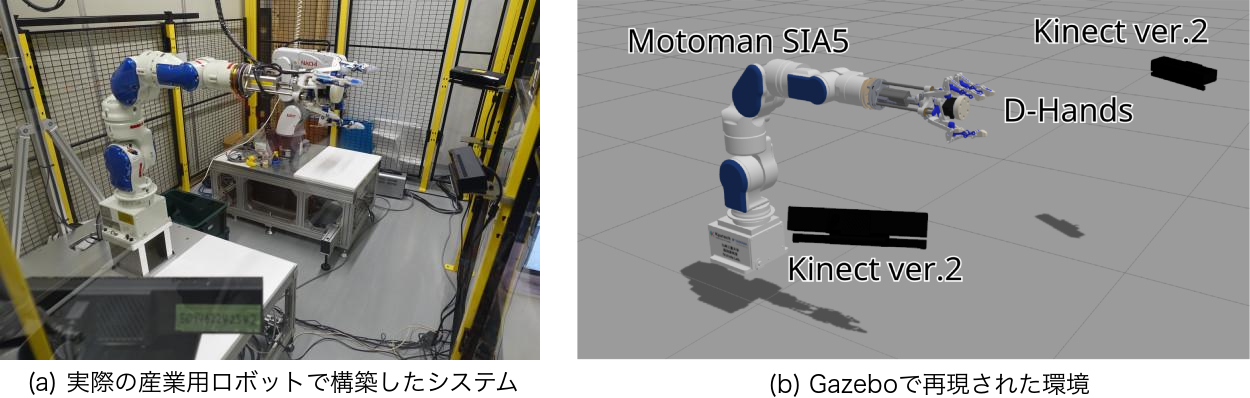
Construction of the Robotic Intelligent Space
In this research, the robot is represented not only on the real world but also on the physics engine called Gazebo.
We examine the effectiveness of our method by simulation.
To implement our method, the multiple RGB-D sensors (Kinect V2) are installed to detect the obstacles and the picking targets.
In the following video, T-RRT (Transition-based RRT) is applied to generate a safe trajectory which does not approach the obstacle.
In the following video, we show the demonstration of the application of motion planning technology.
The user can teach the motion by just using the tablet-type device like talking to the humanoid robot.
株丹 亮, 西田 健, ''ポテンシャル関数を用いるT-RRTによる経路探索,'' 日本ロボット学会学術講演会, 3L3-03, Sep. 2015.

R. Kabutan, R. Tanaka, S. Oomori, M. Morita, E. Inohira, K. Yoshida, H. Ohtake, T. Nishida, ''Development of robotic intelligent space using multiple RGB-D cameras for industrial robots'', Proc. of ICT-ROBOT, ThBT3.2, Pusan, Sep. 8, 2016.
この研究に関するソースコードをGithubで公開しています.