Index
Next Gen. industrial robot
Simple Structured Gripper Using Electromagnet and Magnet
Recently, various universal grippers have been proposed for gripping the various shaped object.
In particular, at Nishida Lab, we research on “Universal gripper using magnetic force”.
MRα fluid gripper (We proposed) can grip the various shaped object, however, a detail design is required for downsizing the gripper.
In this study, we proposed simple structured gripper (Water Gripper) which detail design isn’t required for downsizing and can grip the various shaped object the same as MRα fluid gripper.
Summary
This gripper is driven only by applying electric power, so a motor driver, a complexed controller, and a special equipment is NOT required.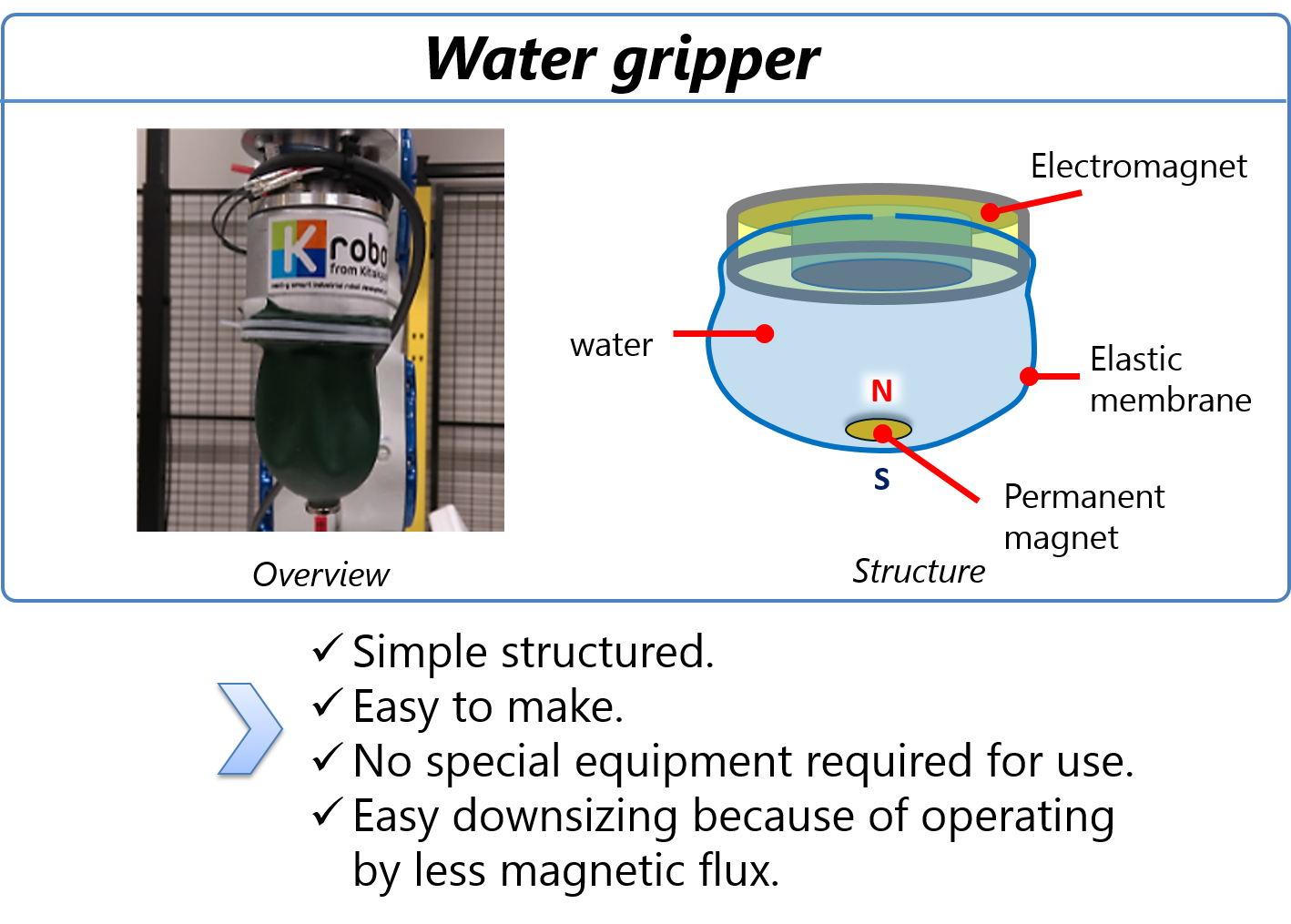
Downsizing Water Gripper
The water gripper can be driven with less magnetic force so, it can be easily downsized. We addressed the downsizing of the components of the water gripper.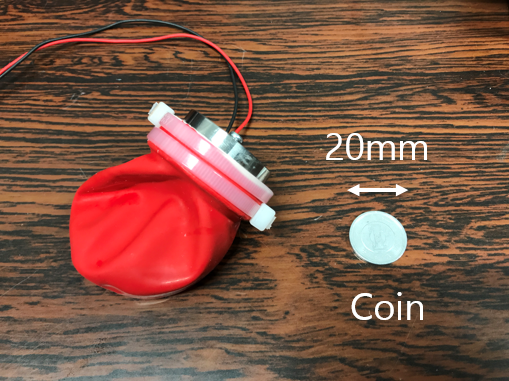
Movie (Downsized gripper)
This gripper can easily pick and place the fragile object such as quail egg and the wet object such as boiled quail egg only by applying electric power.
津上 祐典, 西田 健, ''電磁石と磁石を用いる構造が簡単なユニバーサルグリッパ,'' 第35回日本ロボット学会学術講演会, 東洋大学, Sep. 2017.

Y. Tsugami, T. Nishida, ''Simple Structured Gripper Using Electromagnet and Magnet ,'' ICT-Robot2017, Kagoshima university, 2017.(Best Conference Paper Award )