目次
ニューラルネットワーク
未知物体に対する把持計画の生成
Grasp planning for unknown objects
本研究では,把持対象の物体の形状が事前に分からない場合でも最適な把持計画を生成するアルゴリズムの開発に取り組んでいます.
把持計画とは,物体をどのような姿勢で把持するかを表現したものです.
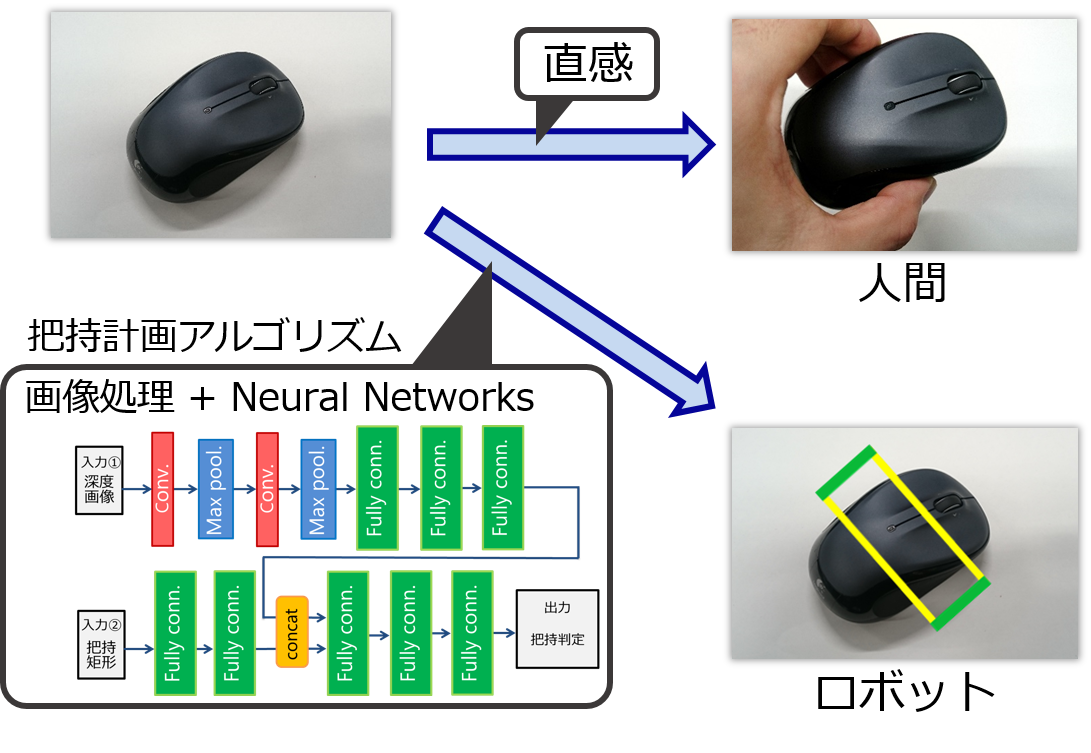
人間は物体を把持するとき,たとえその物体が初めて見た物体であっても,掴み方を特に意識することなく直感的に持ち上げることができます. 一方,ロボットには人間のような直感はないため,同じことをロボットにさせるのは容易ではありません.現状の産業用ロボットが把持する物体は形状が既知であり,把持姿勢を事前に教示した上で把持を行っています. そのため,人手不足が懸念されている家電ごみの分別工場や食品の仕分け工場など,毎回異なる形状の物体を搬送する現場への産業用ロボットの導入は困難です.この問題を解決するため, 本研究では画像処理とニューラルネットワークを利用した把持計画アルゴリズムを開発しています.
人間は物体を把持するとき,たとえその物体が初めて見た物体であっても,掴み方を特に意識することなく直感的に持ち上げることができます. 一方,ロボットには人間のような直感はないため,同じことをロボットにさせるのは容易ではありません.現状の産業用ロボットが把持する物体は形状が既知であり,把持姿勢を事前に教示した上で把持を行っています. そのため,人手不足が懸念されている家電ごみの分別工場や食品の仕分け工場など,毎回異なる形状の物体を搬送する現場への産業用ロボットの導入は困難です.この問題を解決するため, 本研究では画像処理とニューラルネットワークを利用した把持計画アルゴリズムを開発しています.
開発中のアルゴリズム
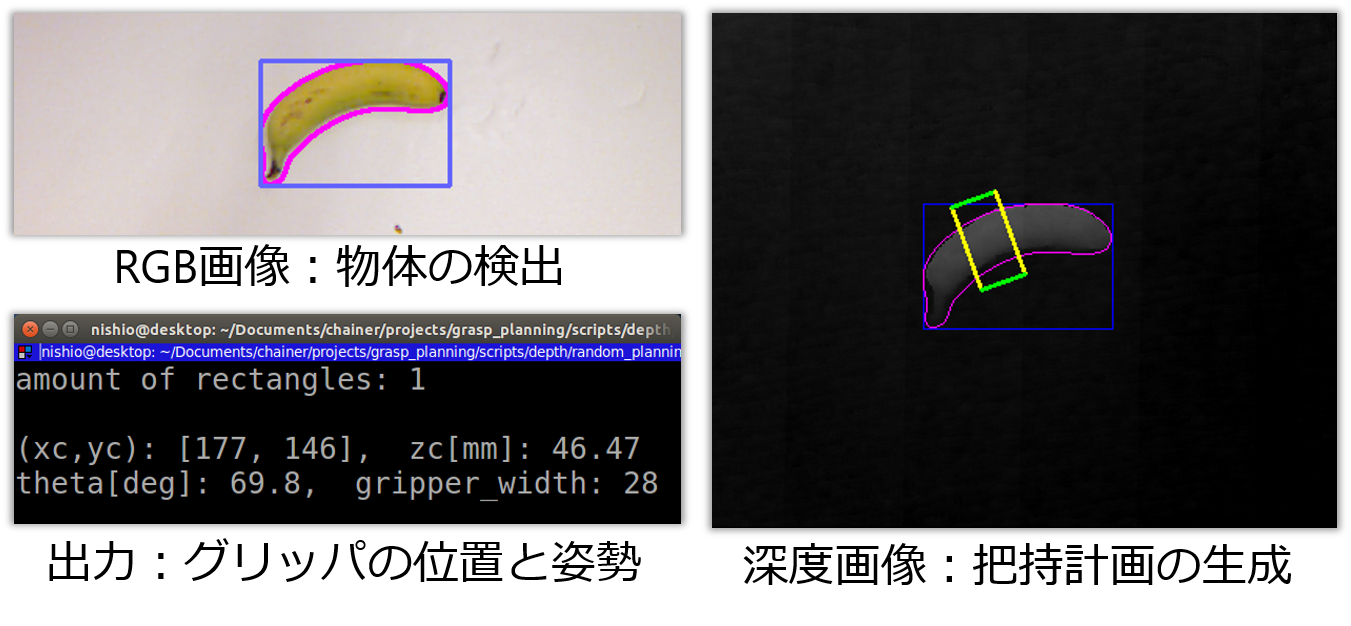
現在開発中のアルゴリズムでは平行チャック型のグリッパの使用を想定しており,入力に物体の RGB 画像と深度画像をとります. また,把持計画のステップを物体認識フェーズと把持計画生成フェーズに分けて開発を進めています. 物体認識フェーズでは,RGB 画像から画像処理により把持対象の物体を検出します. 把持計画生成フェーズでは,RGB 画像から検出した物体領域を深度画像に当てはめ,学習済みの畳み込みニューラルネットワーク (CNN) を組み込んだアルゴリズムによって把持計画を生成し, 三次元的なグリッパの位置と姿勢を出力します.将来的には複数の物体が積み重なった状態での把持やベルトコンベア上を流れる物体の把持を目指し, 安定で正確なアルゴリズムの開発に取り組んでいます.