目次
屋外移動車両型ロボット
自動運転のための3次元環境計測
3D environmental measurement for autonomous car
近年,交通事故の削減,渋滞の緩和などの期待から自動運転技術の開発に注目が集まっています.西田研究室では,特に自動運転における周辺環境認識において重要なセンサであるLIDAR(light detection and ranging)をターゲットとして研究しています.研究では,LIDARの性能評価のシミュレーションや実験による検証をはじめとして,LIDARを用いた物体抽出手法の構築,検証を行っています.
最近では,ミニチュアの道路環境, RGB-Dカメラ,計算機からなる仮想道路環境計測システムを構築し,LIDARのレーザ投影パターンの検証実験を行う方法論を提案しました.
LIDARによる計測
右:計測により得られる点群
仮想道路環境計測システムによる計測
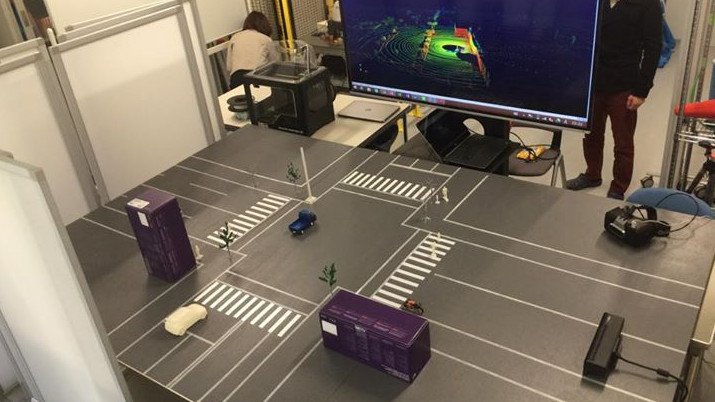

右:計測により得られる点群に物体抽出アルゴリズムを適用した様子
点群重畳による遠方計測精度の向上
LIDARより得られる点群データは,計測対象までの距離が長くなるにつれ,少なくなります.一般にデータの少ない対象の認識は困難です.そこで計測対象のデータを増やすため,点群を時系列方向に重畳する手法を提案しています.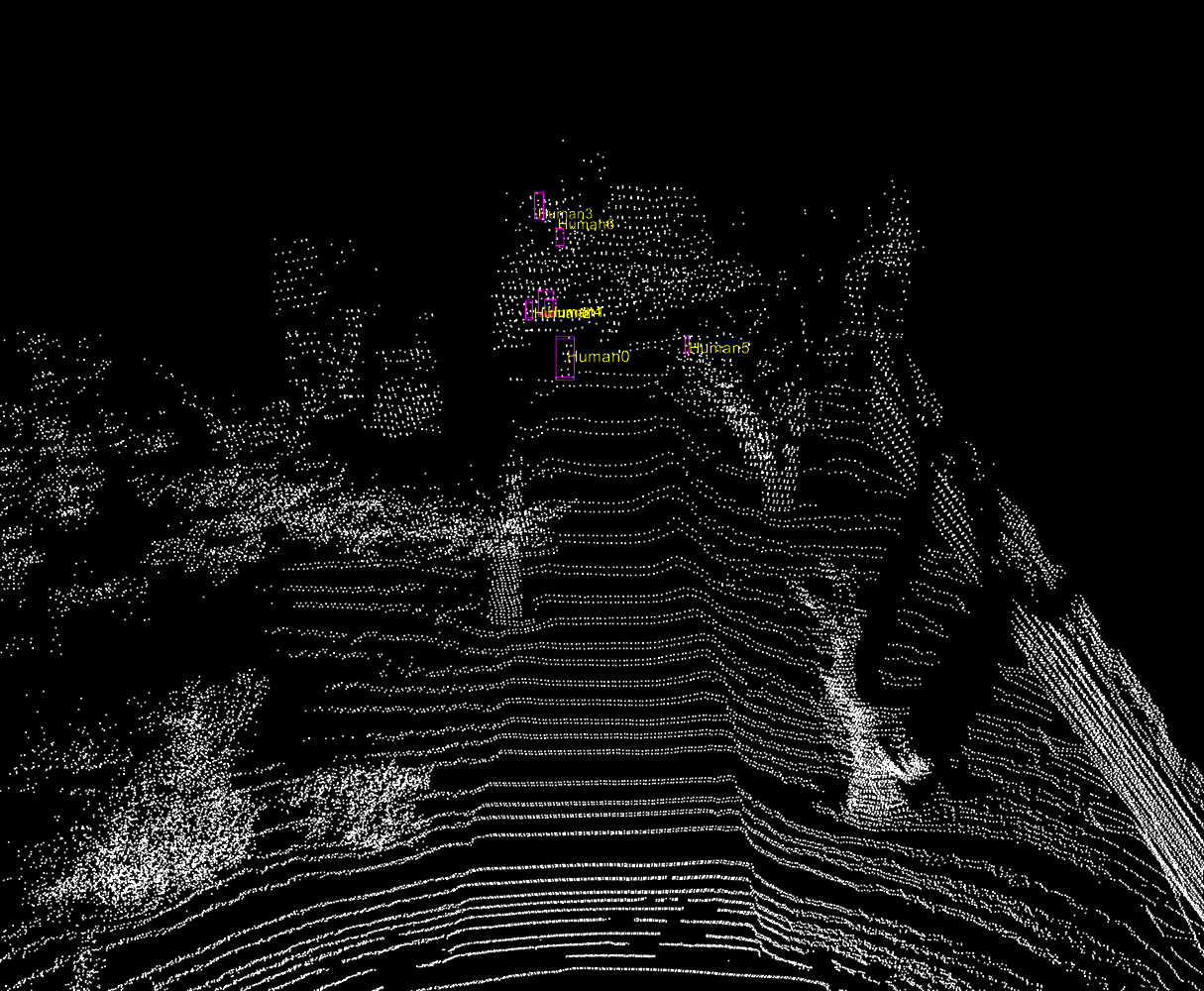
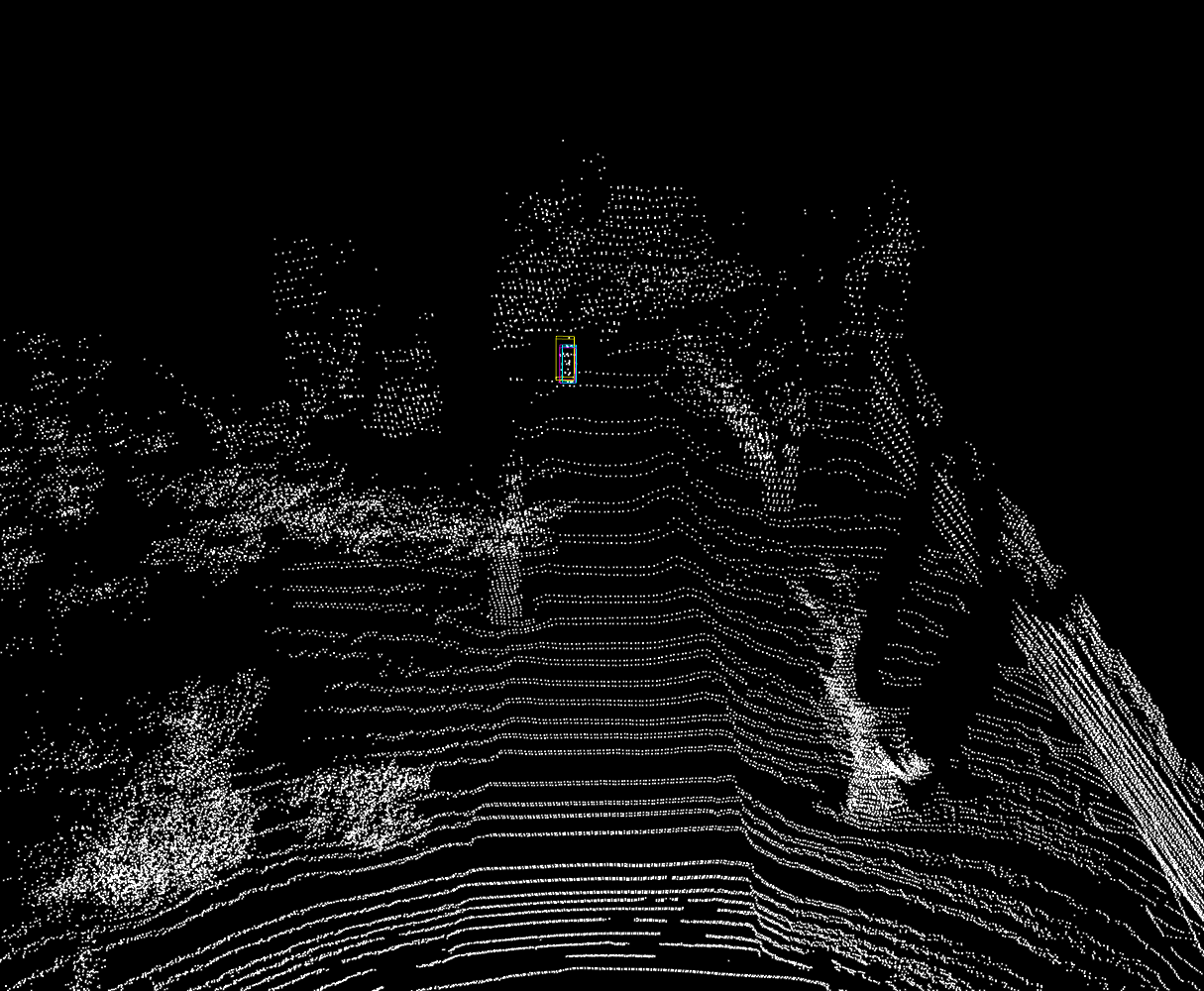
右:重畳後