目次
屋外移動車両型ロボット
三次元計測によるクアッドコプタの遠隔姿勢制御
Remote State Control of Quad-copter by Three-demensional Measurement
近年,無人航空機( UAV:Unmanned Aerial Vehicle )に関する研究が注目を集めており, 本研究では,クアッドコプタと呼ばれる 4 枚羽のヘリコプタに注目する.一般に,ヘリコプタよりも 各種制御が容易であるという特長を有しており,無人航空運送や点検業務への導入が検討されている. 一方,クアッドコプタは機体の構造上,風の影響を受けやすく,風が強い状況では飛行が困難である. したがって,気候変動などが発生する屋外環境でクアッドコプタを利用するためには,風の影響に対して,1. 風に対して機体の姿勢を維持する.
2. 風に対して流されること無く,目標の航空軌道を飛行する.
といった性能を維持することが要求される.本研究では,クアッドコプタの3次元位置と 機体の姿勢をリアルタイム計測し,クアッドコプタの三次元位置と姿勢を制御するための 遠隔自動操縦システムを開発することで,上述の制御性能を実現する制御系を構築し, 実際に,クアッドコプタと三次元計測装置を用いて実装し,目標軌道を飛行するような制御手法を提案しました.
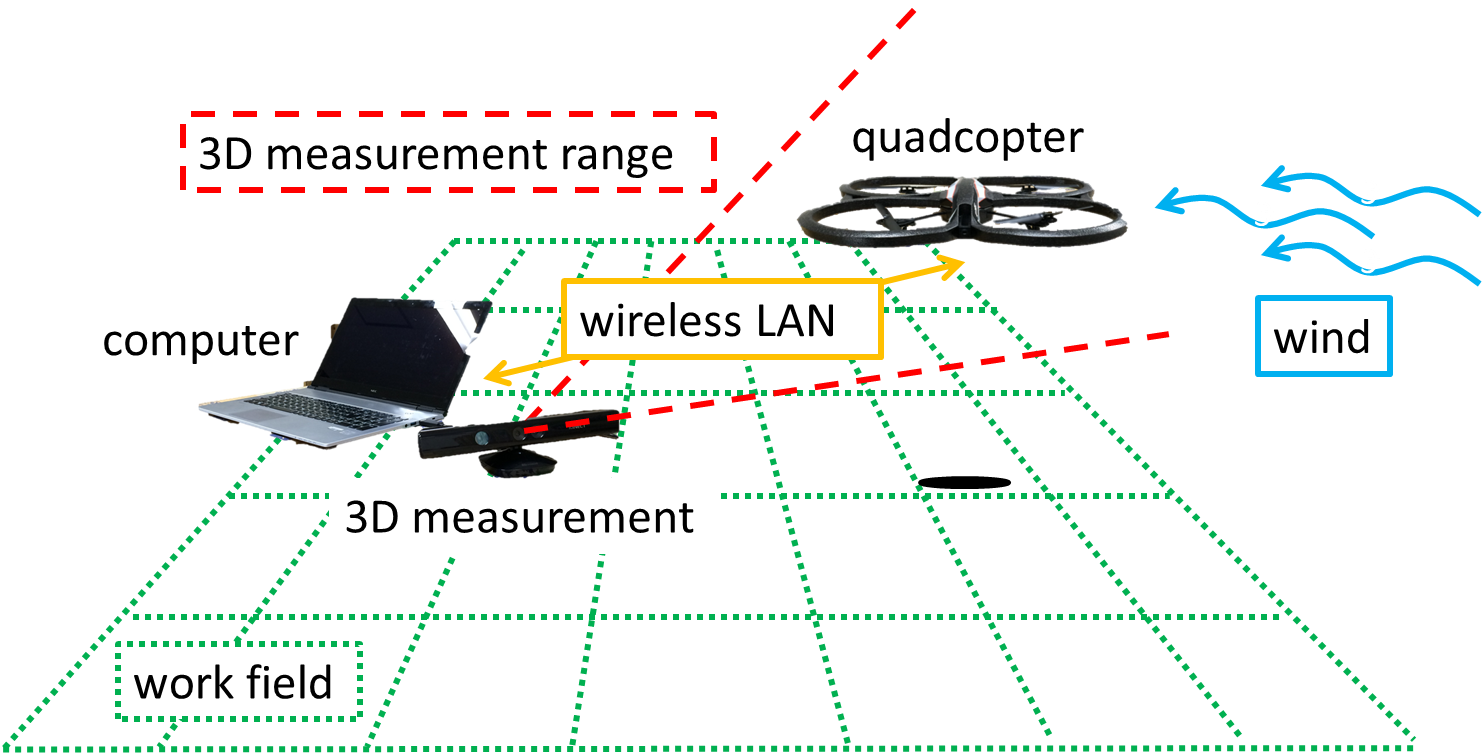
遠隔自動制御システムの概要
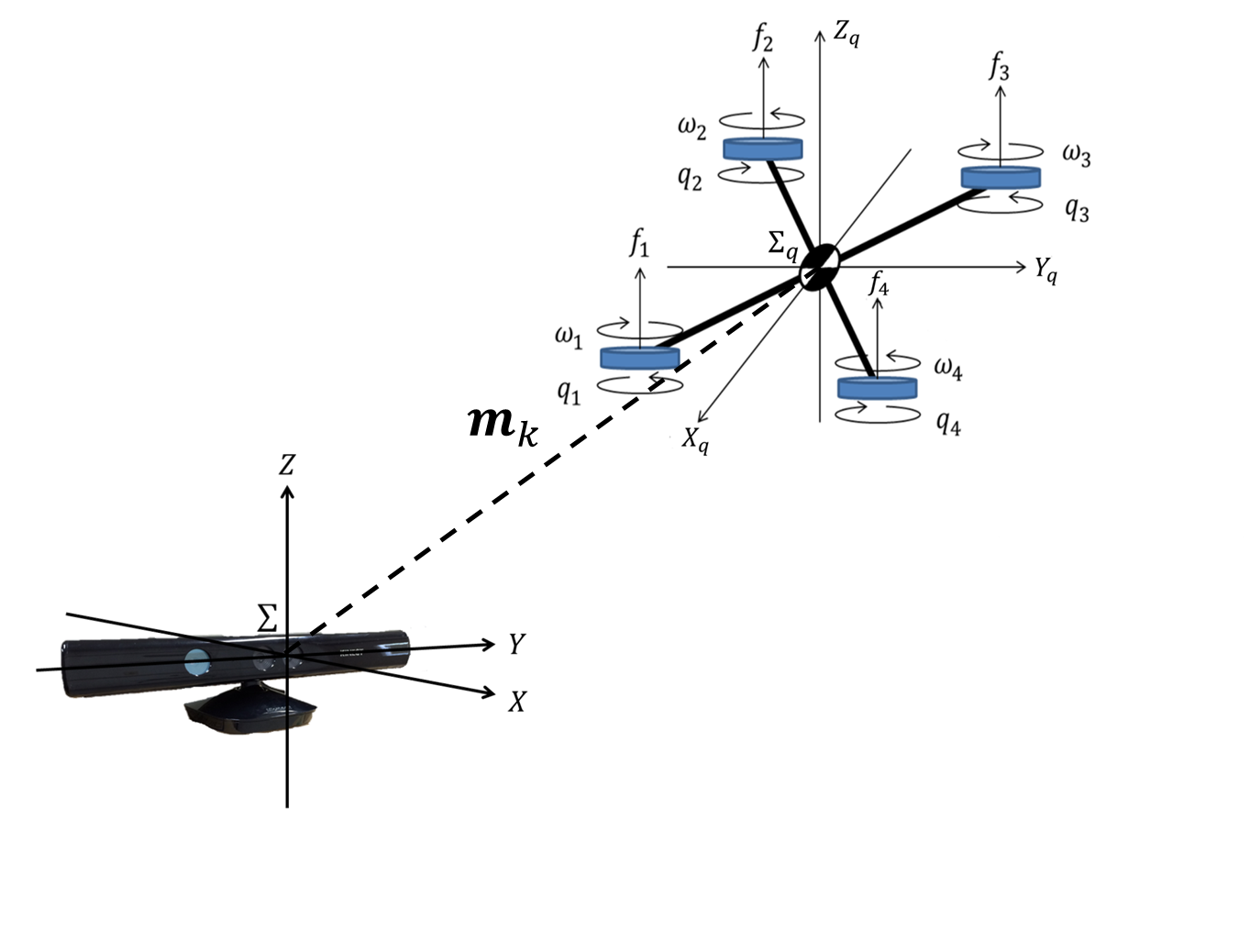
三次元計測装置とクアッドコプタの関係