目次
画像処理
単眼カメラを用いる移動物体の相対位置の推定
近年,ドローンと呼ばれるUAV(Unmanned aerial vehicle:無人航空機)が普及してきた.そのドローンの位置を観測する手法として人の目測やGNSS(Global Navigation systems:全地球航法衛星システム)を使う方法がある.しかし,目測できないほど遠い距離やGNSSを利用できないトンネル内などではドローンの位置を観測することができない.
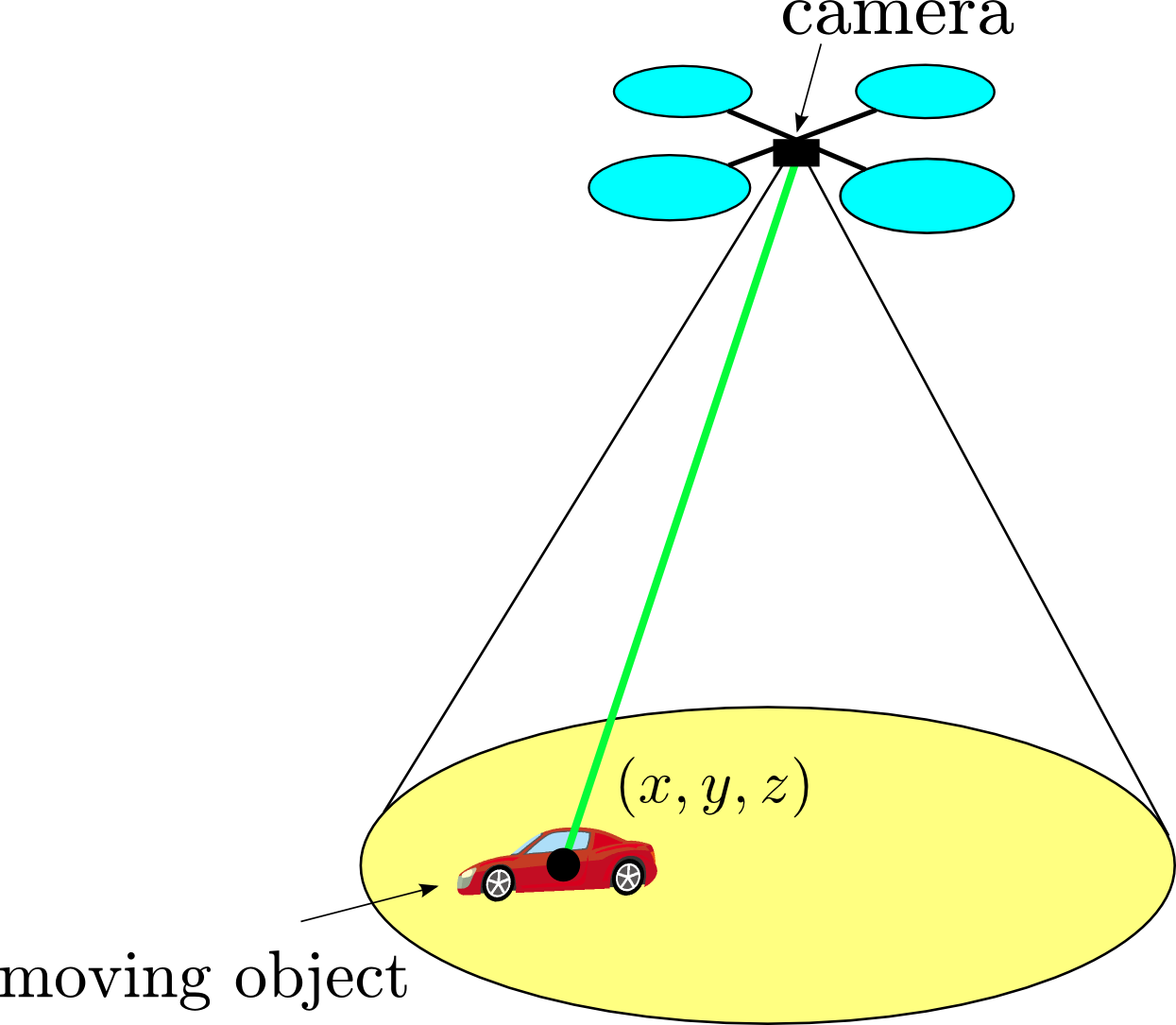
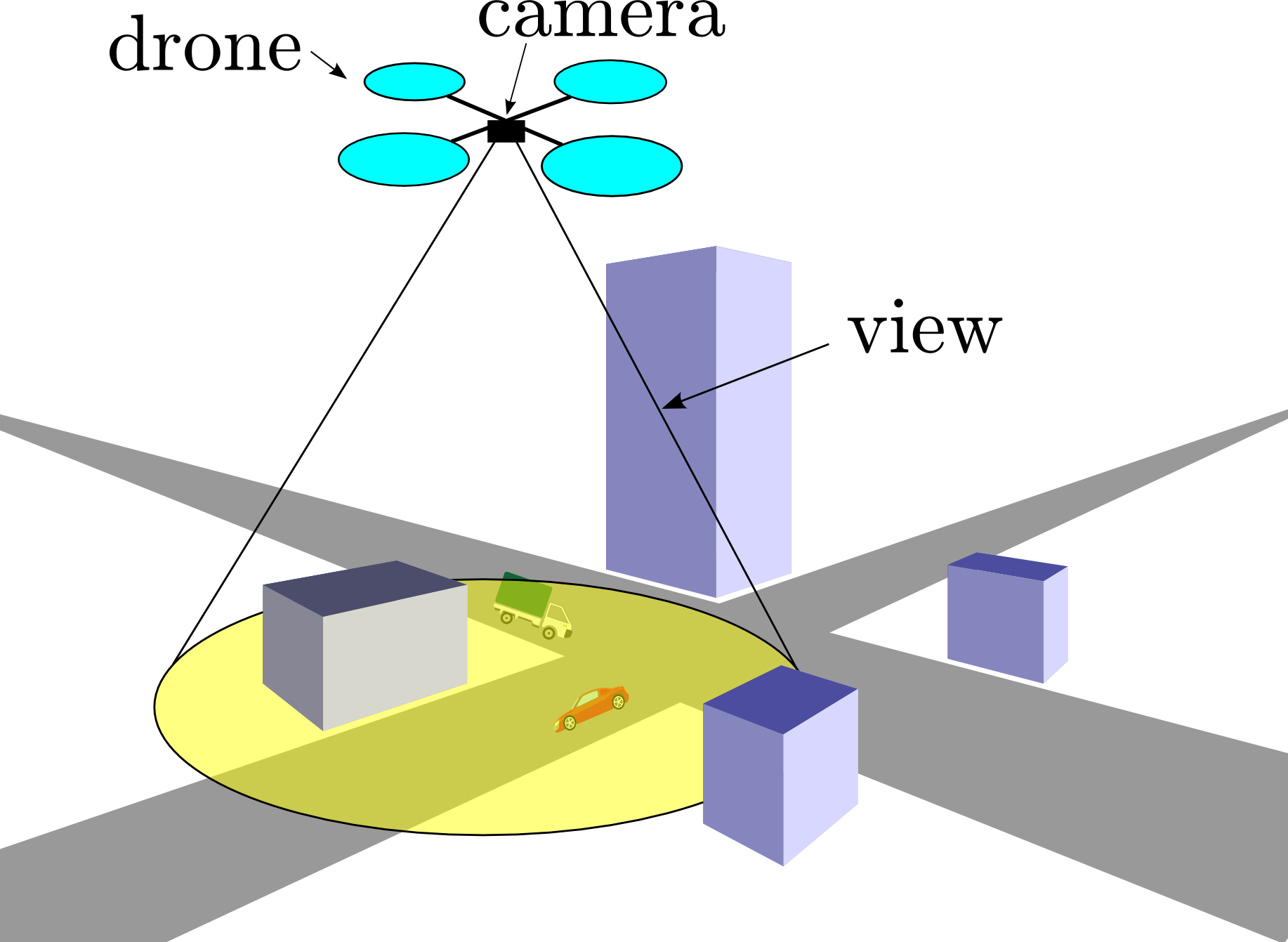
そこで,スイスのチューリッヒ大学が提案した手法がSVO(Fast Semi-Direct Monocular Visual Odometry)である.これは,ドローン下向きに搭載された単眼カメラより得られる画像からドローンの自己位置を推定する手法である.
そこで,スイスのチューリッヒ大学が提案した手法がSVO(Fast Semi-Direct Monocular Visual Odometry)である.これは,ドローン下向きに搭載された単眼カメラより得られる画像からドローンの自己位置を推定する手法である.
研究内容
このSVOを用いて,ドローンの自己位置推定をしつつ,画像内に移動物体が存在したら,カメラとその移動物体との位置関係を推定する.