目次
次世代スマート産業用ロボット
RGB-Dセンサを用いたインテリジェント空間の構築
Structure the Robotic Intelligent Space for industrial robot using RGB-D sensors
本研究では三次元計測センサを用いて産業用ロボットのための作業空間であるインテリジェント空間(Robotic Intelligent Space)の構築に取り組んでいます.
センサによる空間認識はロボットを現場に導入する上で非常に重要です.不測の事態に対応したり,ロボット同士の協働作業を行ったりする上で最初に必要になる部分だからです.
例えば,ものが流れてくる工場の生産ラインを考えるとき,ロボットは作業空間に入ってきたものを認識して,それに対しワークを実行する必要があります. このように動的に変化する環境においてもロボットが自ら考えて実行するような知能型のシステムを構築することができます. 私達は本研究を通して,三次元リアルタイム空間認識を目指します.
センサによる空間認識はロボットを現場に導入する上で非常に重要です.不測の事態に対応したり,ロボット同士の協働作業を行ったりする上で最初に必要になる部分だからです.
例えば,ものが流れてくる工場の生産ラインを考えるとき,ロボットは作業空間に入ってきたものを認識して,それに対しワークを実行する必要があります. このように動的に変化する環境においてもロボットが自ら考えて実行するような知能型のシステムを構築することができます. 私達は本研究を通して,三次元リアルタイム空間認識を目指します.

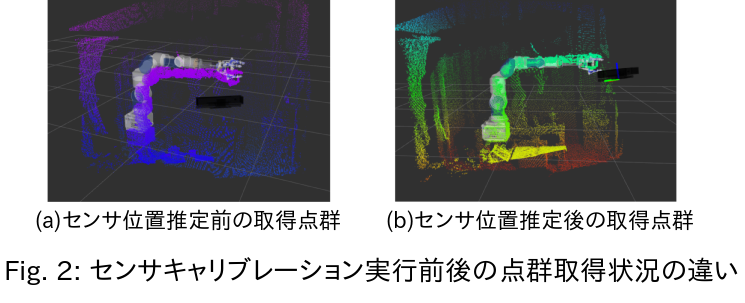
三次元計測センサの自動キャリブレーション
インテリジェント空間の構築には,カメラが正しくキャリブレーションされていることが必要不可欠です.そこで私達はRGB-Dカメラの外部キャリブレーションの自動化の研究を行なっています. 従来の手法は,キャリブレーションボードを使用し撮影した画像から相対位置を算出してましたが,本研究では使用する産業用ロボットの位置,および形状は既知であるということを利用し,センサにより得られた点群情報を用いてモデルとのマッチングを行うことによりその相対位置を算出しカメラの位置姿勢の推定を行います. 三次元点群データのマッチングにはICPアルゴリズムを利用しており,ROSを用いて情報の取得,更新をリアルタイムで行なっています.