目次
次世代スマート産業ロボット
電磁石と磁石を用いる構造が簡単なユニバーサルグリッパ
Simple Structured Gripper Using Electromagnet and Magnet
近年,様々な形状の把持を目的として汎用性の高いグリッパ(ユニバーサルグリッパ)が数多く開発されています.ユニバーサルグリッパの動作原理にはエアーを用いるもの,モータを用いるもの,磁力を用いるものがあります.特に,西田研究室では「磁力を用いるグリッパ」について研究を行っています.MRα流体グリッパは様々な形状の対象物の把持が可能ですが,小型化に詳細な設計が必要です.そこで本研究では,MRα流体グリッパと同様に様々な形状の対象物が可能である上に,構造・小型化が簡単なユニバーサルグリッパを提案しました.概要
本グリッパは電圧の印加のみで把持/開放を制御するためモータドライバや別途複雑なコントローラ,エアーコンプレッサ等の専用設備が不要です.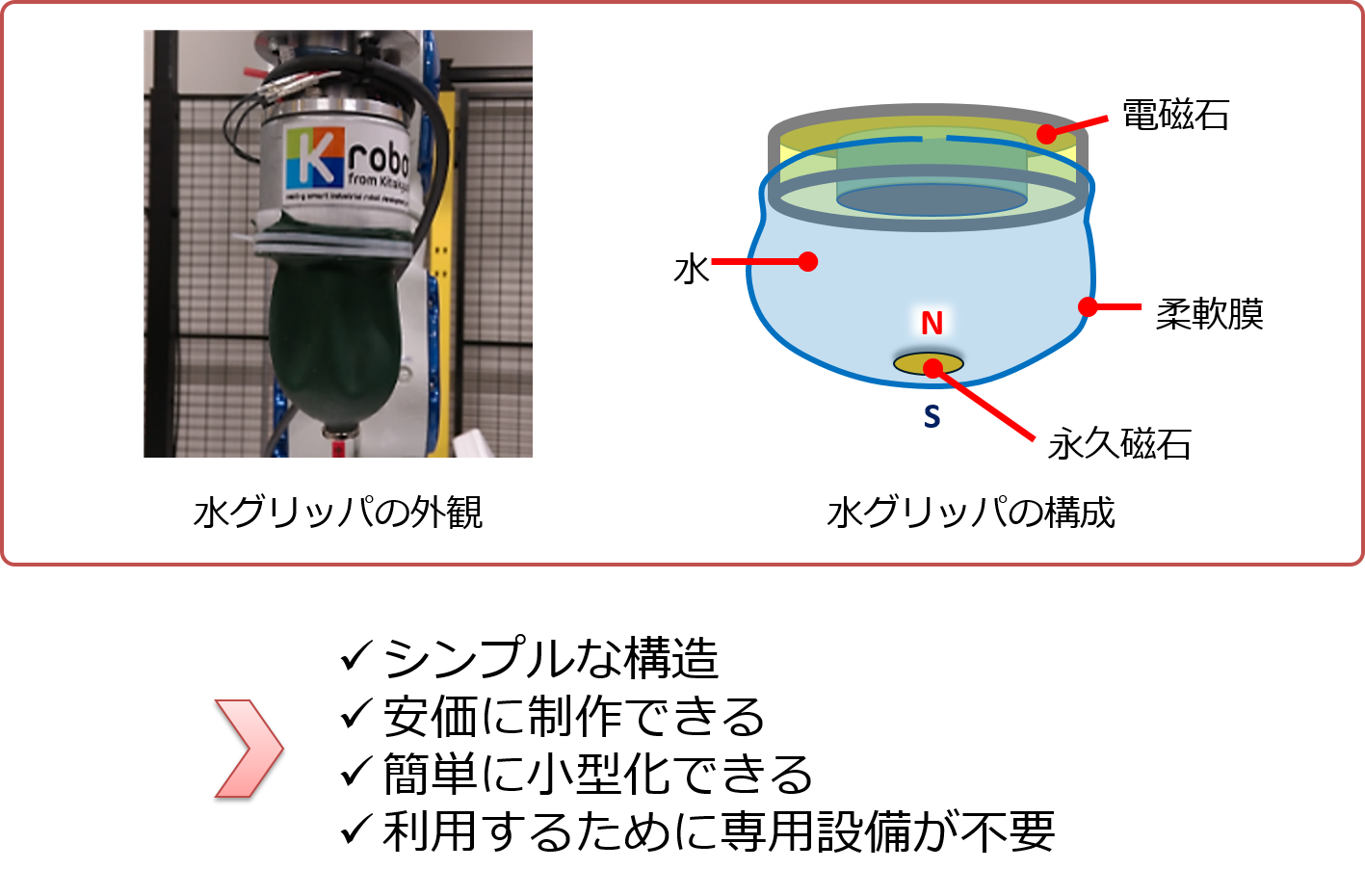
小型化
概要で示した構成と全く同一で各要素のサイズを小さくするだけで簡単に小型化することができます.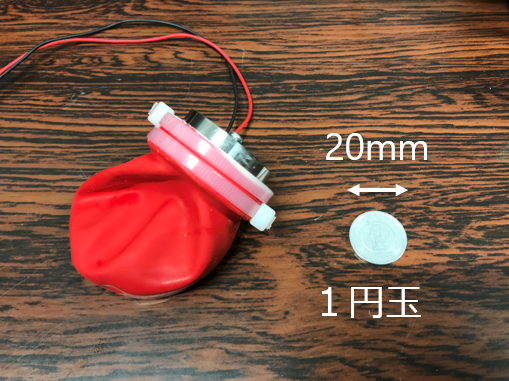
動画(小型化したグリッパ)
簡単な構造かつ電圧の印加のみで,うずらのゆで卵のような表面が濡れた対象物やうずらの卵のような壊れやすい対象物を壊すことなく把持することができます.
津上 祐典, 西田 健, ''電磁石と磁石を用いる構造が簡単なユニバーサルグリッパ,'' 第35回日本ロボット学会学術講演会, 東洋大学, Sep. 2017.

Y. Tsugami, T. Nishida, ''Simple Structured Gripper Using Electromagnet and Magnet ,'' ICT-Robot2017, Kagoshima university, 2017.(Best Conference Paper Award )