自動運転車両の開発
Development of automated vehicle
- ♦自動で走行する自動車の開発
- 電気自動車をベースとして自動走行可能な自動車の開発を行っている.
- ♦自動で動かすための操縦方法の開発
- 搭乗者にとって乗り心地の良い操縦法の開発を行っている.
安全な自動車の開発
Development of Safety vehicle
- ♦アクティブサスペンション制御法の開発
- 安全で乗り心地のよい車の開発を行うために,車体の振動を抑制できる制御法の開発を行っている.
- ♦高速道路を安全に走行するための自動操縦法の開発
- 車の搭乗者にとって乗り心地が良く,かつ,安全に走行できる操縦法の開発を行っている.
- ♦大型車両の横転を防ぐための操縦法の開発
- 大型車両は熟練操縦者でも横転することがある.この横転を防ぐための操縦サポート法の開発を行っている.
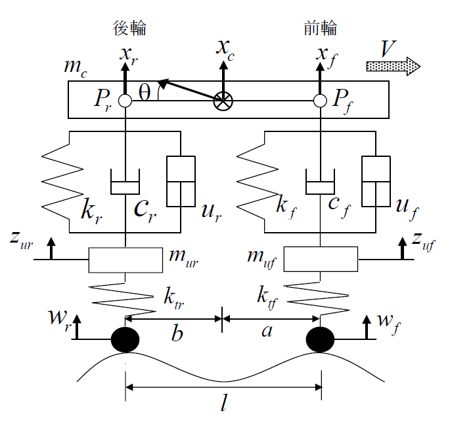 図3 アクティブサスペンション制御
図3 アクティブサスペンション制御 図4 ドライビングシミュレータ
図4 ドライビングシミュレータ
図5 横転抑制制御あり
図6 横転抑制制御なし
操縦者の緊急状態推定
Estimation of emergency state of drivers
- ♦カメラを用いた操縦者の眠気推定
- 操縦者の瞬き回数等を計測することにより,眠気の判定を行うことができる.瞬き回数計測を用いた眠気判定法の開発を行っている.
- ♦カメラを用いた操縦者の緊急状態推定
- 病気等により,操縦者が緊急状態に陥ることがある.この状態を掲出して,車を安全に停止する手法の開発を行っている.
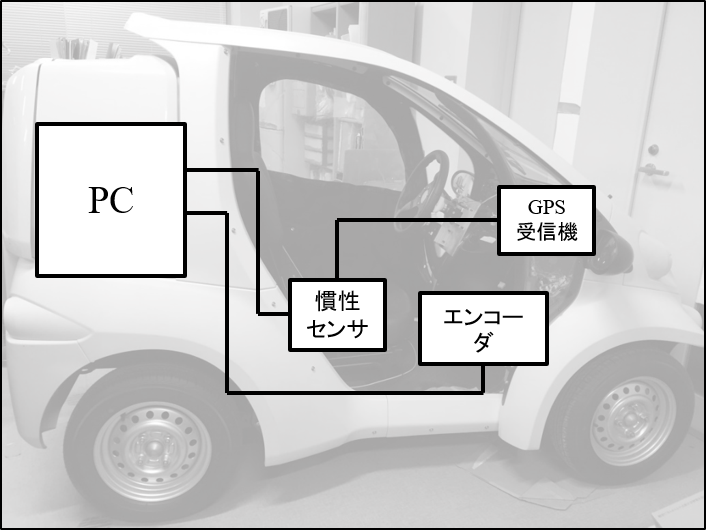
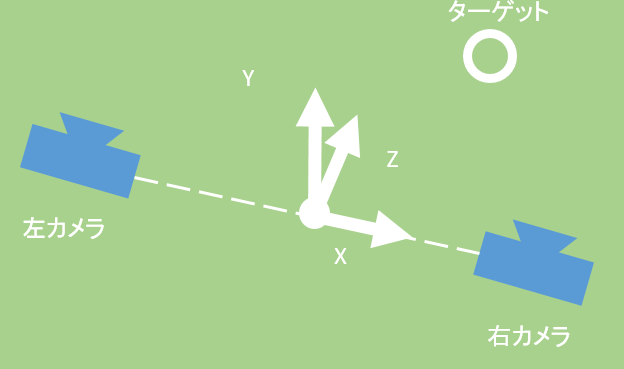 図7 2眼カメラを用いた位置計測
図7 2眼カメラを用いた位置計測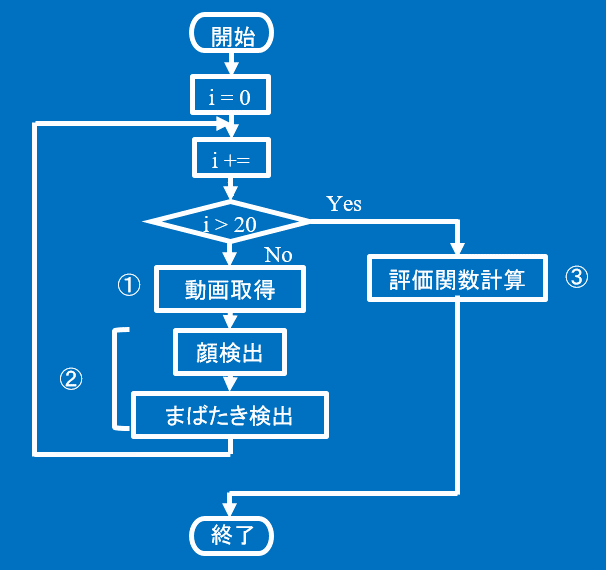 図8 瞬き計測アルゴリズム
図8 瞬き計測アルゴリズム
| 被験者 | 動画 | 真値(回) |
プログラムでカウントした回数(回) | 誤検出(回) | 検出もれ(回) |
| A | 1 | 15 | 15 | 0 | 0 |
| 2 | 15 | 15 | 0 | 0 |
| 3 | 15 | 16 | 1 | 0 |
| B | 1 | 15 | 16 | 1 | 0 |
| 2 | 15 | 16 | 1 | 0 |
| 3 | 15 | 17 | 2 | 0 |
| C | 1 | 15 | 15 | 0 | 0 |
| 2 | 15 | 15 | 0 | 0 |
| 3 | 15 | 15 | 0 | 0 |
図9 瞬き計測結果
筋電を用いたロボットハンドの開発
Development of robot hand using myoelectric Signal
- ♦自由に簡単に動かせる義手の開発
- 人間が考える通りに動かすことのできる義手の開発を行っている.
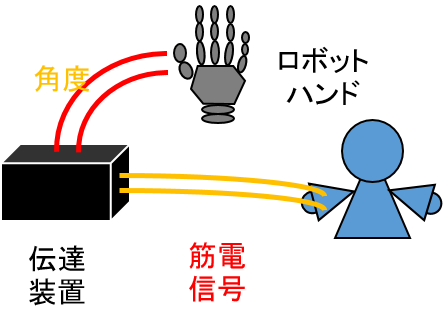
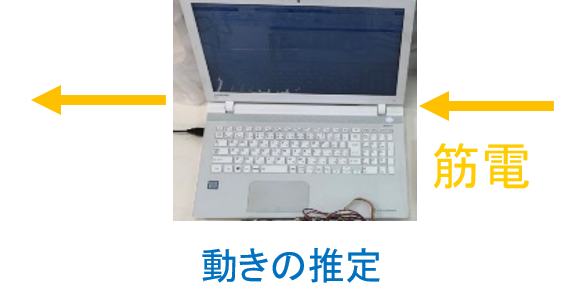
- ♦筋電を入力としたロボットハンドの開発
- 人間の筋電情報を用いて,人間の思うままに動くロボットハンドの開発を行っている.
ロボットハンドを遠隔地(危険地帯)におくことにより,遠隔地作業が安全・簡単にできる.
小さなロボットハンドを体内に挿入することにより,精密な手術を実施することができる.
悪路自走型ロボットの開発
Development of wheel robot moving on rough surface
- ♦自走ロボットの開発
- 人間が入り込みにくい災害現場や被災地において救難者捜索や状況確認のため自走型ロボットが必要になる.
現在下記ロボットの開発を行っている.
- 平坦な路面を高速で自走できるロボットの開発
- 悪路において車体に搭載されたカメラや計測器を揺らさずに走行できるロットの開発
将来,上記2つのロボットを融合した悪路走行型ロボットの開発を目指していている.
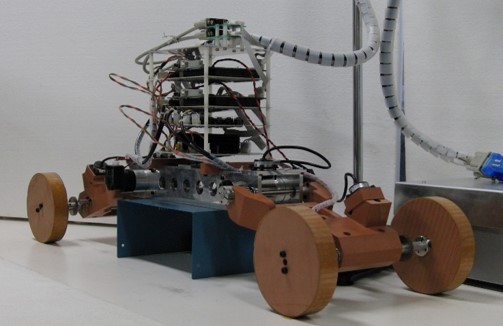
 図11 高速走行ロボット
図11 高速走行ロボット
図12 制御なし
図13 制御あり