目次
ニューラルネットワーク
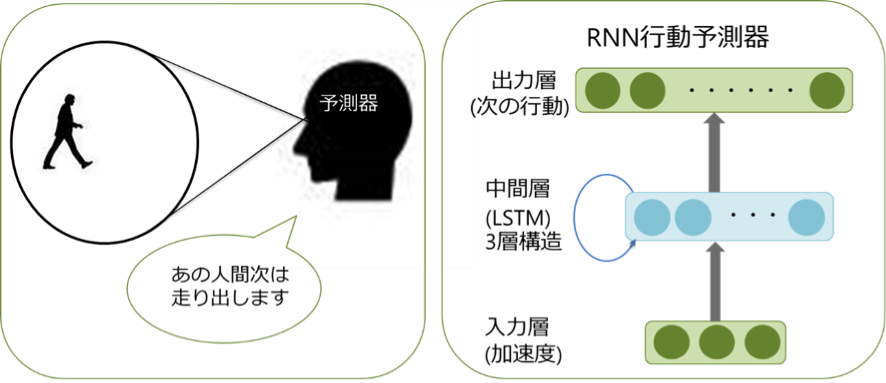
Human Activity Prediction Relying on Acceleration Data using Recurrent Neural Network
In this research, we are conducting research to predict the next action that person will take from the acceleration data of human behavior.
In the behavior prediction method, when the acceleration obtained from human behavior is input to the action predictor, the next action to be performed is outputted.
This behavior predictor is constructed using RNN which is a type of neural network, and it is necessary to learn acceleration data and behavior labels of a series of action flow beforehand.
Currently, various industrial robots are being developed in the world, and development of human cooperative robots is also being carried out among them. If we can predict human behavior, we can make human collaborating robots do risk prediction and make optimal support. In addition, it is possible to detect abnormal behaviors of people in hospitals and construction sites in advance, and to prevent accidents and attacks beforehand.
Currently, various industrial robots are being developed in the world, and development of human cooperative robots is also being carried out among them. If we can predict human behavior, we can make human collaborating robots do risk prediction and make optimal support. In addition, it is possible to detect abnormal behaviors of people in hospitals and construction sites in advance, and to prevent accidents and attacks beforehand.