目次
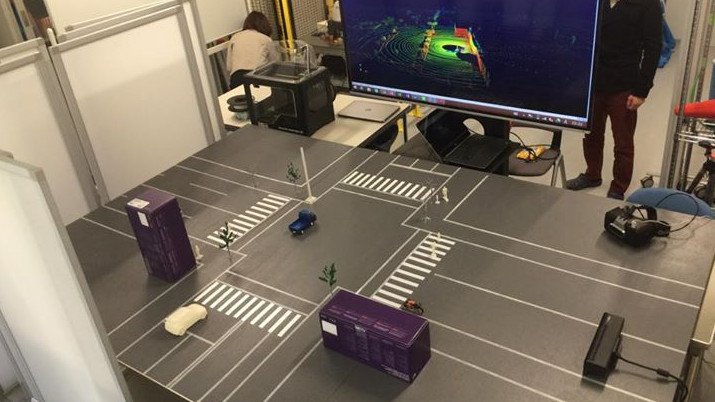
Outdoor moblile car type robot
3D environmental measurement for autonomous car
Recently, attention has been focused on the development of automatic driving techniques from expectations such as reduction of traffic accidents and alleviation of congestion.
Nishida Laboratory is studying LiDAR (light detection and ranging) , which is an important sensor in the recognition of the surrounding environment of automatic operation, as a target.
As research, we are conducting simulation of the performance evaluation of LiDAR, verification by experiment, construction and verification of object extraction method using LiDAR data.
And, we have developed a virtual road environment measurement system consisting of a miniature road environment and RGB-D camera and calculator, and proposed a methodology to perform verification experiment the laser projection pattern of LiDAR.
LiDAR measurement
Right figure:Point cloud data acquired by measurement
Measurement by virtual road environment measurement system

Right figure:Result of object extraction processing
Improvement recognition accuracy of distance objects by superimposing of point cloud data
Pedestrian recognition using LIDAR data has been studied by many authors. When an object recognition algorithm is applied to the data, the recognition of near objects high. But the recognition ratio of distance objects is declines. Because this sensor irradiates lasers radially, the quantity of measurement data obtained from distant objects decreases. Therefore, in order to increase the data to be measured, we propose a method of superimposing time-series LIDAR data.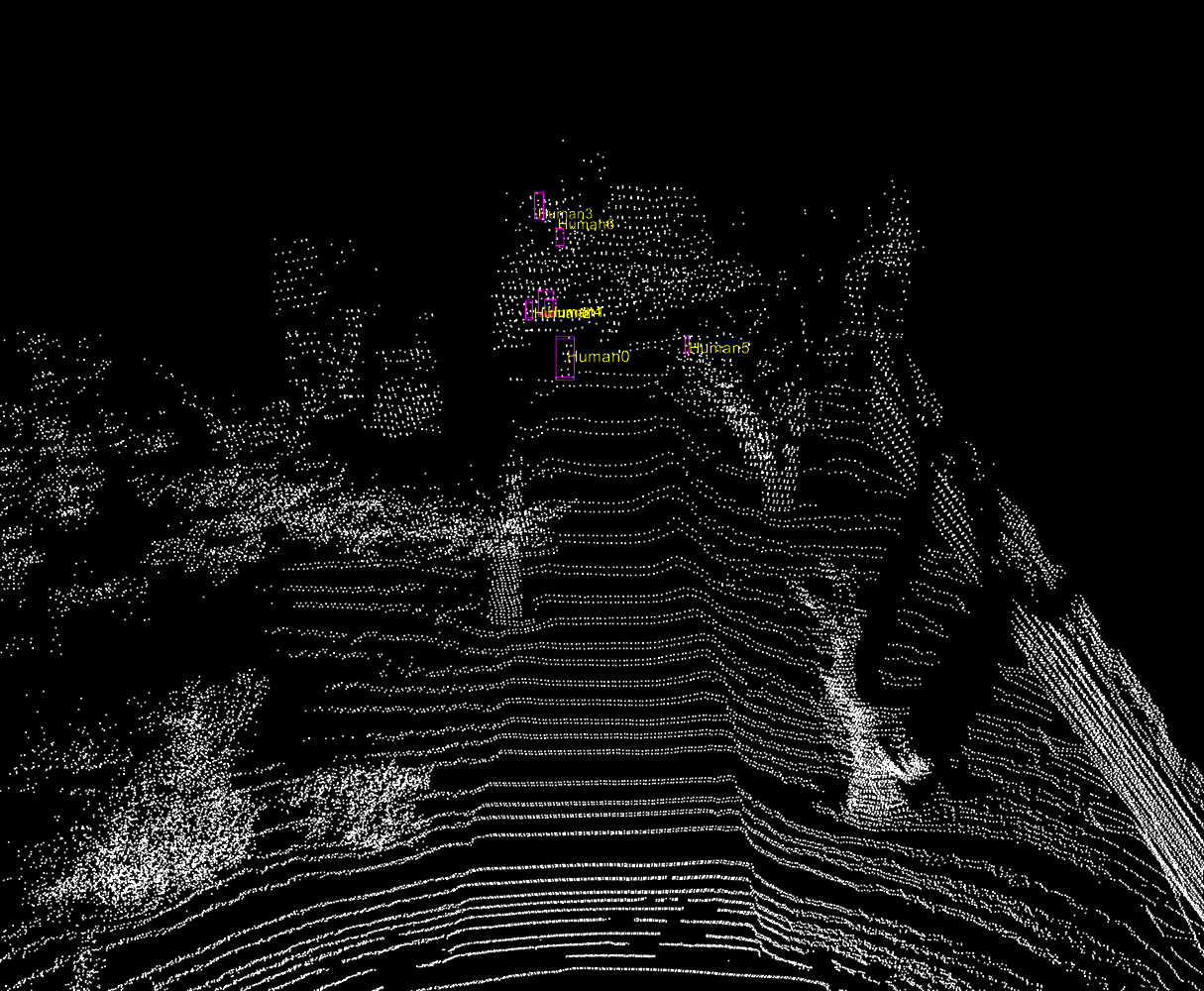
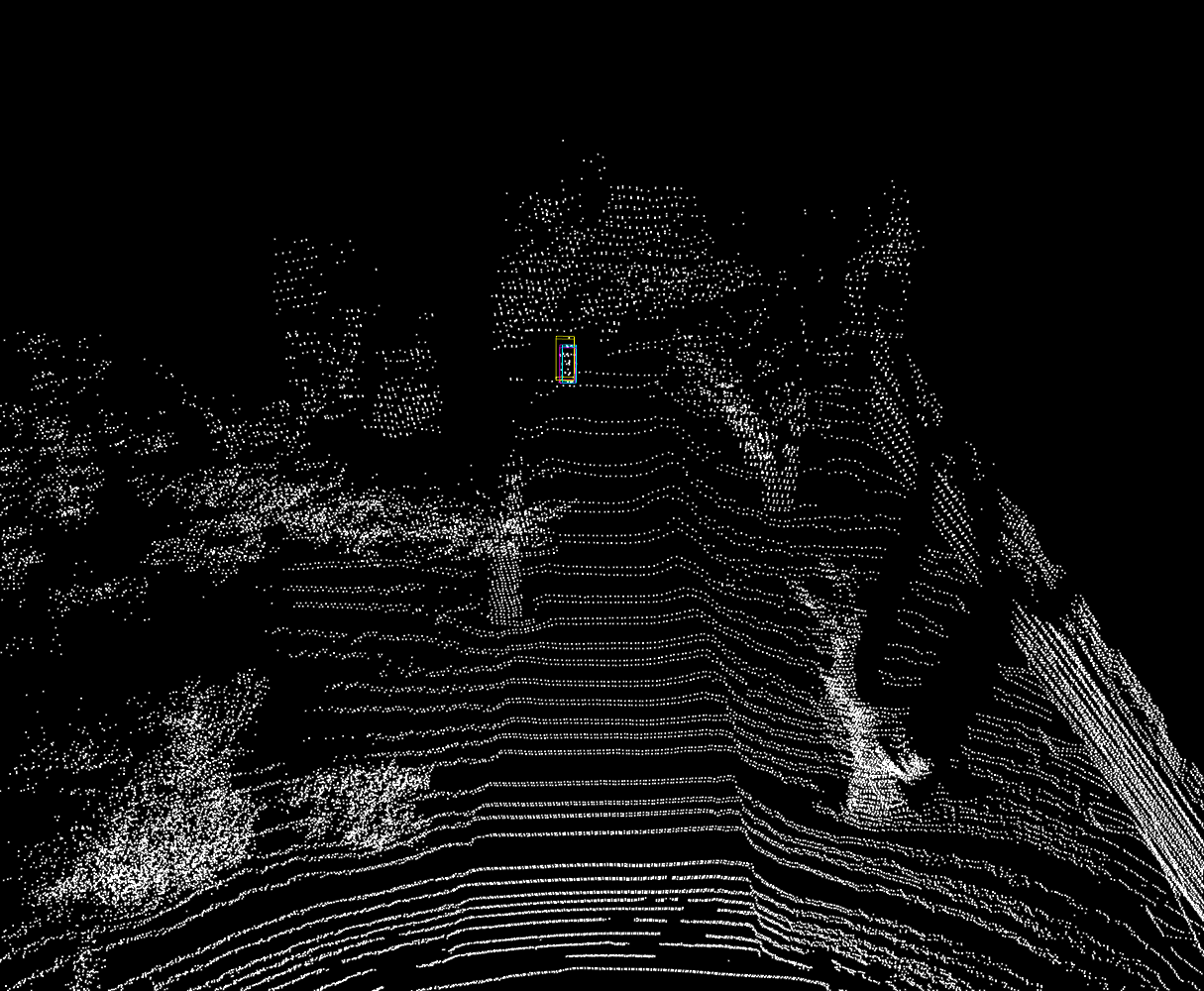
Right figure:After superimposition