目次
センサ融合
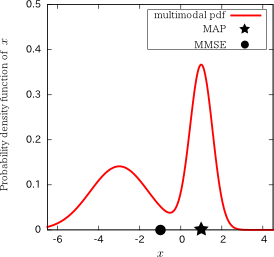
パーティクルフィルタによる多峰性事後確率分布からの点推定
point estimation of particle filter of multimodal posteriori probability distribution
センサの小型化、高性能化などにより複数のセンサを用いて状態推定を行うことができるようになりました。 また、冗長性を向上させるために複数のセンサ取り付けることもあります。 しかしながら、複数のセンサを取り付けることで故障率もあがることが考えられます。西田研究室では,これらの問題に対して、粒子フィルタを用いた複数のセンサからのデータの統合を研究しています。 パーティクルフィルタでは状態の確率分布を得ることができますが、実際には確率分布から唯一の推定値を取り出す必要があります。 一般的な点推定手法では多峰性の確率分布となった場合に適切な推定値を与えることができません。そこで、多峰性の確率分布からの適切な推定値抽出する研究も行っています。